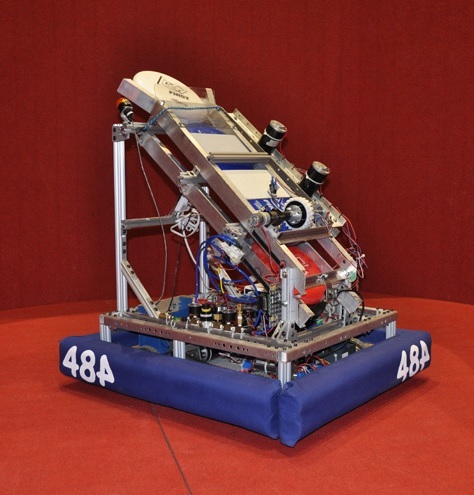
 54-RK15, named after Sarkis, a mentor on the team, was team 484’s 2013 robot and the robot and probably one of the more fun robots to shoot. The robot’s drivetrain consisted of a pair of high traction wheels and a pair of low traction omni-wheels. This combination allowed for good pushing power and acceleration as well as efficient turning. This drive train was driven by gearboxes connected to the wheel shafts by chain. The goal of this robot was to collect frisbees from the human player station and shoot them into goals positioned above the opposing alliance’s driver stations. To store frisbees in the robot, as well as load them into the shooter, an indexing and storing system was created. Sensors kept track of the frisbees in the storage system and dispensed them 1 at a time into the shooting system as needed. This allowed the robot to reliably hold 4 frisbees and shoot them at the press of a button. For the shooter, a pair of large wheels were spun at high speeds and the frisbee was pushed into the wheels. Both wheels were positioned on the same side of the frisbee to give it spin and the first wheel was used to speed up the frisbee while the second was used to bump its speed slightly and more accurately. These wheels were also fitted with encoders in order to precisely measure their rotation rate. The robot also featured specially shaped wooden hooks (not pictured) at the top which allowed it to latch onto the pyramid at the end of the match and raise itself above the ground. Additionally, a defensive mechanism could be added to the robot which consisted of a t-shirt based flag that could deflect frisbees shot by opposing robots. A notable lesson the team learned this year came from the experience of working with chain. Over the course of the competition season, the chain repeatedly broke, and fixing it was both time consuming and messy. In addition, the plastic traction wheels used on this robot had a tendency to shatter, and replacing them required removing the chain. The combination of these two things, forced the decision to move away from chain for most applications and to better design the chain system if it was needed in the future. However, with that said, this robot performed admirably and was very capable at playing both offense and defense.
54-RK15, named after Sarkis, a mentor on the team, was team 484’s 2013 robot and the robot and probably one of the more fun robots to shoot. The robot’s drivetrain consisted of a pair of high traction wheels and a pair of low traction omni-wheels. This combination allowed for good pushing power and acceleration as well as efficient turning. This drive train was driven by gearboxes connected to the wheel shafts by chain. The goal of this robot was to collect frisbees from the human player station and shoot them into goals positioned above the opposing alliance’s driver stations. To store frisbees in the robot, as well as load them into the shooter, an indexing and storing system was created. Sensors kept track of the frisbees in the storage system and dispensed them 1 at a time into the shooting system as needed. This allowed the robot to reliably hold 4 frisbees and shoot them at the press of a button. For the shooter, a pair of large wheels were spun at high speeds and the frisbee was pushed into the wheels. Both wheels were positioned on the same side of the frisbee to give it spin and the first wheel was used to speed up the frisbee while the second was used to bump its speed slightly and more accurately. These wheels were also fitted with encoders in order to precisely measure their rotation rate. The robot also featured specially shaped wooden hooks (not pictured) at the top which allowed it to latch onto the pyramid at the end of the match and raise itself above the ground. Additionally, a defensive mechanism could be added to the robot which consisted of a t-shirt based flag that could deflect frisbees shot by opposing robots. A notable lesson the team learned this year came from the experience of working with chain. Over the course of the competition season, the chain repeatedly broke, and fixing it was both time consuming and messy. In addition, the plastic traction wheels used on this robot had a tendency to shatter, and replacing them required removing the chain. The combination of these two things, forced the decision to move away from chain for most applications and to better design the chain system if it was needed in the future. However, with that said, this robot performed admirably and was very capable at playing both offense and defense.

Ultimate Assent was the 2013 FRC Challenge. In this challenge, 2 alliances of 3 robots raced to score as many frisbees as possible in goals positioned above the opposing alliance’s driver station and at the top of the alliance-colored pyramid. Additional points could also be earned for each robot that could lift itself off the ground using the pyramid with 10 points being if the robot got above the ground, 20 if it got above the second section of the pyramid and even more if it managed to get to the top of the pyramid. Frisbees could be obtained by picking them up off the ground or by loading them into the robot through one of the human player stations. At any given time a robot could only have up to 4 frisbees during tele-op. This meant that robots needed to repeatedly go back to the human player station to get more frisbees or pick them off the ground. Points could also be obtained in autonomous for robots that managed to shoot frisbees into the goals without human intervention. During this period at the beginning of the match, points scored were doubled. Ultimately, the alliance with the most points at the end of the match won. The full rules manual for this game can be found here.