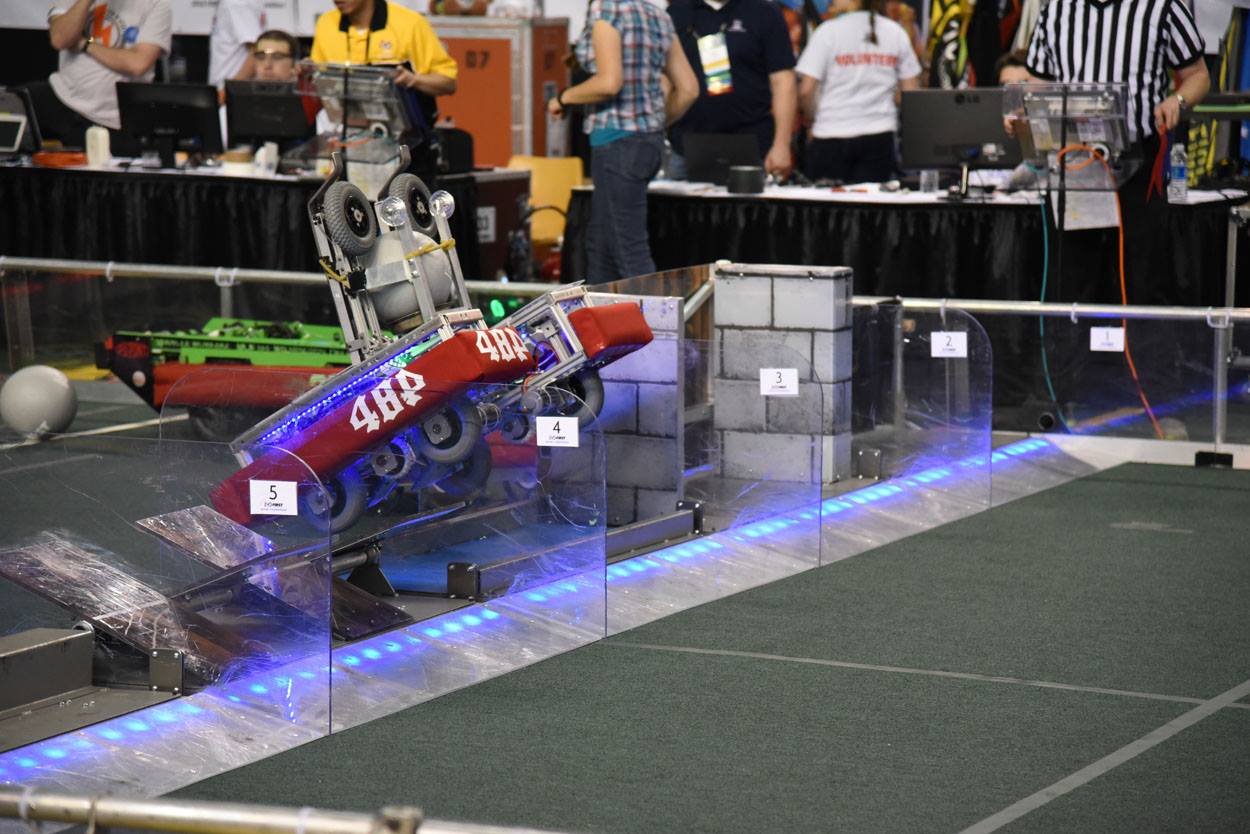
 Albert, named after Albert Einstein, was team 484’s beloved and mechanically challenged 2016 robot. Albert featured a motorized arm that could rotate to a horizontal position to pick up 10 inch diameter balls. Once retrieved, Albert could then shoot these balls into the high or low goals on the field at speeds of up to 60 miles per hour! The same arm also doubled as a means for manipulating obstacles on the field such as the Portcullis and Chival de Frise.
Albert, named after Albert Einstein, was team 484’s beloved and mechanically challenged 2016 robot. Albert featured a motorized arm that could rotate to a horizontal position to pick up 10 inch diameter balls. Once retrieved, Albert could then shoot these balls into the high or low goals on the field at speeds of up to 60 miles per hour! The same arm also doubled as a means for manipulating obstacles on the field such as the Portcullis and Chival de Frise.
Stronghold was the 2016 FRC Challenge, with a medieval theme. In this challenge, 2 alliances of 3 robots battled it out to cross the other team’s defenses, weaken the opposing alliance’s tower by scoring boulders into the high and low goals, and capture the opposing alliance’s tower by climbing within the last few seconds of the match. The official FIRST game manual for this challenge can be found here.