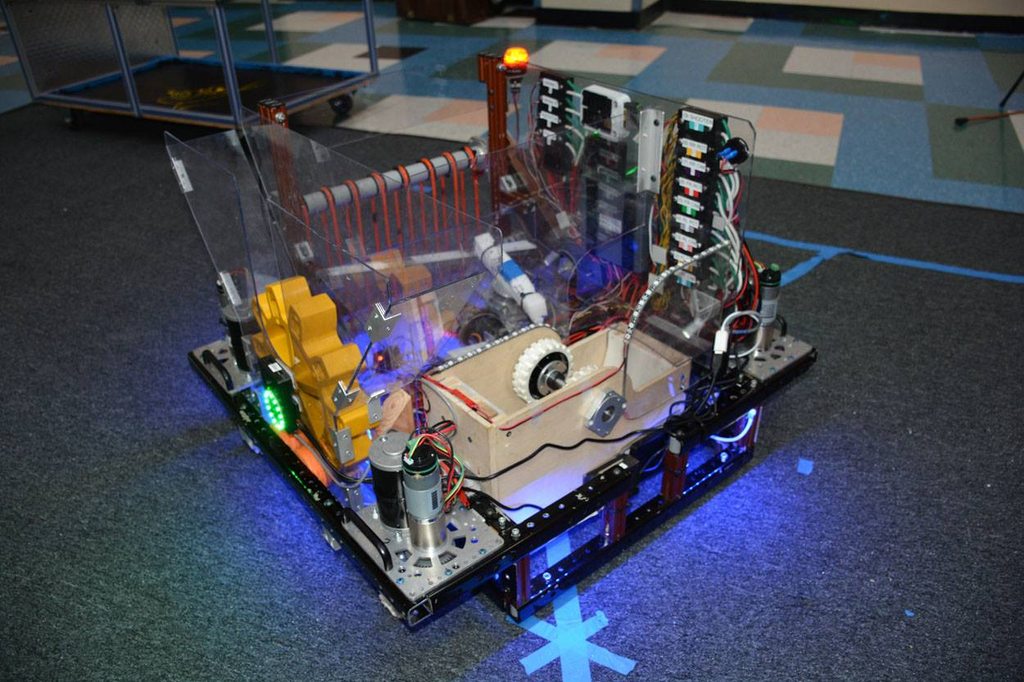
 K3V1N, named after a team alumnus in the spirit of the 2013 robot 54-RK15, was team 484’s 2017 robot and the first robot, used in competition by the team, to feature “swerve drive”: a holonomic drive train that allows each of the robot’s wheels to independently pivot and rotate. K3V1N featured a passive gear collection system which could retrieve 11 inch gears from a human player feeder station and deliver the gears to pegs on the alliance’s “airship” where the gears could be used to spin rotors and collect points. The robot also featured the first completely reliable computer vision system to line up with the airship pegs in autonomous, allowing it to deliver gears to any of the 3 pegs before the tele-op portion of the match began. The robot also featured a ball pickup/shooting system and the team’s first successful climber, the latter of which effectively enabled the robot to climb the ropes which drop from the airship at the end of tele-op, gaining the team 50 points every match.
K3V1N, named after a team alumnus in the spirit of the 2013 robot 54-RK15, was team 484’s 2017 robot and the first robot, used in competition by the team, to feature “swerve drive”: a holonomic drive train that allows each of the robot’s wheels to independently pivot and rotate. K3V1N featured a passive gear collection system which could retrieve 11 inch gears from a human player feeder station and deliver the gears to pegs on the alliance’s “airship” where the gears could be used to spin rotors and collect points. The robot also featured the first completely reliable computer vision system to line up with the airship pegs in autonomous, allowing it to deliver gears to any of the 3 pegs before the tele-op portion of the match began. The robot also featured a ball pickup/shooting system and the team’s first successful climber, the latter of which effectively enabled the robot to climb the ropes which drop from the airship at the end of tele-op, gaining the team 50 points every match.

STEAMworks was the 2017 FRC Challenge, with a steampunk theme. In this challenge, 2 alliances of 3 robots raced to grab gears from feeder stations on opposing sides of the field and deliver them to the alliance’s airship. With the help of these gears, the airships’ rotors could be activated, gaining the team points. In addition, “fuel”, represented by small yellow balls, could be scored into hoppers located on the alliance’s side of the field to fuel up the airship. If the ships reached a pressure of 40kPa, the alliance was awarded even more points. Finally in the last 30 seconds, the airships drop their robot and the robots can climb up the ropes to gain even more points. Ultimately, the alliance with the most points at the end of the match, wins the airship race. The full rules manual for this game can be found here.