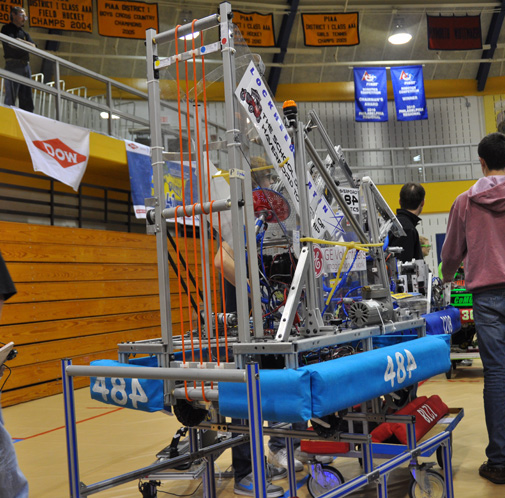
 Chamber-LIN, named after the basketball player Wilt Chamberlain, was the team’s 2012 robot. The robot consisted of a ball pickup, a shooter, and a foot. For this year’s game, the robot needed to grab foam basketballs off the ground and shoot them into hoops at the end of the field. To do this, Chamber-LIN’s ball pickup system, known as the ball magnet, was used. This system consisted of orange surgical-style tubing arranged vertically like a conveyor belt. The balls would get squeezed in-between this conveyor belt and either the floor or a wall inside the robot. This process allowed the belt to pull the balls up to the top of the robot where they would be loaded into the shooter. The shooter consisted of a pair of high-speed 8-inch rubberized traction wheels positioned so that the ball was given a natural backspin when shot. This allowed the ball to fall down into the hoop after coming in contact with the backboard. The balls were fed into these wheels using a pneumatic actuator with a colander on the end to fit the curvature of the balls. The third major part of this robot was a foot that would fold down from the front. This protrusion would allow the robot to lower the see-saw style bridges that were positioned in the middle of the field. This was important for getting on the bridge at the end of the match for balancing and gaining extra points.
Chamber-LIN, named after the basketball player Wilt Chamberlain, was the team’s 2012 robot. The robot consisted of a ball pickup, a shooter, and a foot. For this year’s game, the robot needed to grab foam basketballs off the ground and shoot them into hoops at the end of the field. To do this, Chamber-LIN’s ball pickup system, known as the ball magnet, was used. This system consisted of orange surgical-style tubing arranged vertically like a conveyor belt. The balls would get squeezed in-between this conveyor belt and either the floor or a wall inside the robot. This process allowed the belt to pull the balls up to the top of the robot where they would be loaded into the shooter. The shooter consisted of a pair of high-speed 8-inch rubberized traction wheels positioned so that the ball was given a natural backspin when shot. This allowed the ball to fall down into the hoop after coming in contact with the backboard. The balls were fed into these wheels using a pneumatic actuator with a colander on the end to fit the curvature of the balls. The third major part of this robot was a foot that would fold down from the front. This protrusion would allow the robot to lower the see-saw style bridges that were positioned in the middle of the field. This was important for getting on the bridge at the end of the match for balancing and gaining extra points.

Rebound Rumble was the 2012 FRC challenge. In this challenge, 2 alliances of 3 robots each, raced to score foam basketballs in hoops positioned at the ends of the field. Balls scored in the single highest hoop gained the alliance 3 points, balls scored in the middle hoops gained 2 points and balls scored in the lowest hoop gained 1 point. The match started with a short autonomous mode where robots could be loaded with 2 balls that when scored would earn the rated point value for the hoop plus an additional 3 bonus points. After the autonomous period, drivers took control of the robots to pick up more balls and shoot them into the goals for points. Near the end of the match, it was common for robots to attempt to balance on the platforms positioned at the middle of the field. Points would be awarded for alliances that managed to get a robot to balance on their alliance colored platform. Additional points were also awarded if 2 or even 3 robots managed to balance successfully. Additionally, the center platform, known as the coopertition platform could be used to gain both alliances ranking points. If a member from each alliance managed to balance together on the center platform, both alliances would be awarded ranking points that improved their overall qualification position. The full rules manual for this game can be found here.